Az árpacukortól a kivetített műszerekig


Az árpacukor-berendezés végül is ötven évvel ezelőtti kuriózum maradt, de mindenképp jelzi annak a korszaknak a fő törekvését: amennyire nagyok és gyorsak lettek az utasszállítók, annyira kellene növelni a repülésük biztonságát is, különösen a kritikus megközelítési, leszállási szakaszban. Szerzőnk a későbbiekben majd azt is megmutatja nekünk, milyen valóban működő megoldásokra jutott az iparág azóta, de először olvassuk ezt az érdekes cikket, amelyet a Repülés 1961. júliusi száma közölt.
A repülés legbonyolultabb művelete a vakleszállás. Rossz időben a pilótának többtíztonnás gépét 200 kilométer/óra körüli sebességgel, fojtott — és gázturbinák esetében csak lassan fokozható teljesítményű — hajtóművekkel a betonpálya irányába, annak küszöbéhez enyhe szögben lejtő siklópályán kell vezetnie —, látás nélkül. A siklópályától gépe legfeljebb 1-2 métert térhet el oldalra, vagy függőlegesen.
A siklópályán vezetés egyik módja a radaros, lokátoros „lebeszélés” — pontos összműködést kíván a földi radarkezelő és a pilóta között. Természetesen valamely azonos nyelvet mindkettőjüknek jól kellene beszélniük.
A másik, elterjedt módszer az ILS (Istrument Landing System = Műszer Leszálló Eljárás) automatikusabb. Rádióadói olyan, irányított sugár-nyalábokat sugároznak, melyek közepén a siklópálya helyezkedik el. (Budapest- Ferihegyen mind a lokátoros, min az ILS berendezés rendelkezésre áll.)
Most egy hasonló célra szolgáló —, de merőben új „közlési” módszerű műszer elterjedéséről számolhatunk be. Hivatalos neve para-vizuális irányító. Találóbb azonban a közlőműszer formájára utaló „árpacukor”-elnevezés. Ennek a különös műszernek ugyanis nincs mutatója, azt egy spirális csíkozású mű- anyag-rúd helyettesíti. A rúd hosszanti felületének csak kb. 1/4 része marad szabadon a védőcső hasítékában. Ha most a rudat hossztengelye körül forgatni kezdik, az átlós csíkok a cső hasítékában — a forgatás irányától függően — a cső egyik, vagy másik vége felé látszanak haladni.
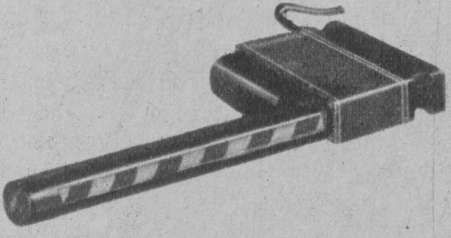
Az ILS-berendezésnél a mutatók kitérítésére használt elektromos energiát itt — megfelelő erőfokozással — a spirális rudat forgató kis villanymotor hajtására fordítják. Az „árpacukros” megoldással tehát feltűnő, „kiabáló” műszer kerül a pilóta elé, amelynek legkisebb kitérése is mozgásként, tehát azonnal észrevehető, a figyelmet felhívó jelzésként mutatkozik.
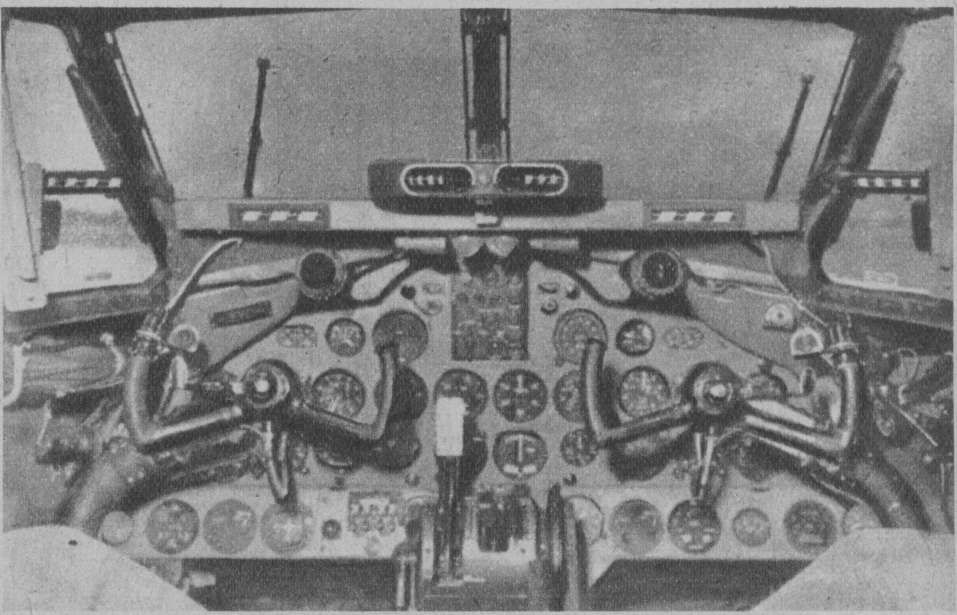
Az aránylag kisméretű, 10 centiméter körüli hosszúságú közlőszerkezeteket a műszerfal fölé, a pilótakabin első falát alkotó szélvédőüveg alsó peremére lehet erősíteni. így a pilóta akkor is látja a műszert, ha tekintetét előre, a betonpálya felé szegezi. Ha pedig a műszer jelez, mozgását akkor is észreveszi, ha nem éppen azt nézi.
A pilótával szemben egy, vízszintesen, keresztben elhelyezett „árpacukor” az oldalirányú eltérést közli. Tőle jobbra-balra, ugyancsak vízszintesen, de gép hosszirányában elhelyezett egy-egy műszer kap helyet. Ezek azonos irányban, tehát előre, vagy hátrafelé látszanak „haladni”, és a siklópályára jutáshoz való magassági kormányzást közlik. Ugyancsak elegendő, ha a pilóta a szeme sarkából látja őket, mozgásukat azonnal érzékeli. A rudak forgásának sebessége arányos a siklópályától eltéréssel, így amint a gép arra már kezd visszatérni, a forgás, a csíkok haladása lassul. Az alig féléves múltra visszatekintő műszer iránt máris óriási az érdeklődés és a gyártó Smith-cég a műszert azzal propagálja, hogy az a most, szériában épülő Vickers-Vc-10 nagytávolságú utas és tehergép, valamint az ugyancsak új, középtávú, háromhajtóműves DH-121 Trident sztenderd leszálló-műszere lesz.
Az új berendezést úgy konstruálták, hogy azt a csaknem valamennyi, jelentősebb repülőtéren felszerelt ILS földi adókra hangolva, minden további nélkül használni lehessen a korábbi, keresztmutatós műszerek helyett.
Amennyiben a gép teljesen automatikusan száll le, a készülék nem működik, mert megfigyelték, hogy a pilótát — aki az automatikus leszállás során csak ellenőriz, de nem működik közre, „cselekvésre csábítják” a mozgó közlőműszerek. Ha azonban a leszállás során szükség lenne az automatikus berendezés, a robotpilóta kikapcsolására, azzal egyidejűleg a paravizuális irányító is azonnal bekapcsolódik. A kísérleti repülések során még a talaj felett 6 méterrel végzett ilyen „pilótacserék” is sikerrel jártak.
Máris megállapították, hogy a vakleszállás ezzel a műszerrel sokkal hamarább sajátítható el, egyszerűbben gyakorolható és könnyebben hajtható végre, mint a keresztmutatóssal. A pilóták főként annak örülnek, hogy a vakleszállás során nem kell tekintetüket mereven a keresztmutatós műszerre szegezniük, hanem szükség szerint nézhetnek előre, vagy figyelhetik az egyéb, ugyancsak fontos műszereket, így például a sebességmérőt, fordulatszámjelzőt.
Az új műszer számtalan kísérleti repülés során, a legkülönbözőbb típusokba szerelve bizonyította be kiválóságát. Az egyszerű, ötletes megoldás világszerte nagy figyelmet keltett s bizonyos, hogy rohamos terjedésével hozzájárul majd a legnehezebb repülés- mozzanat, a vakleszállás sikeres, biztonságos végrehajtásához.
Most pedig lássuk, hogyan történik a „vakleszállás” – vagyis az autoland – manapság:
Alapvetően két különböző irányt vettek a fejlesztések és a repülési eljárások, a technikai újítások e tekintetben! A vadászrepülőgépekben elterjedt HUD (Head-Up-Display) polgári alkalmazása az egyik fejlődési irány. A pilóták szeme elé vetítik a legfontosabb információkat: magasság, sebesség, függőleges emelkedés és süllyedés, a repülőgép helyzete a siklópályához és a végső egyeneshez képest. Ennek a rendszernek a segítségével a pilótának nem kell folyamatosan a benti műszerekre való fókuszálás után kinézve megállapítania, hogy a repülőgép a megfelelő helyen a siklópályán és a végső egyenesen van-e. Ennek a technikai eszköznek az alkalmazásával – és természetesen megfelelő képzéssel – a pilóták képesek a repülőgépet CAT IIIA (elhatározási magasság 100 láb – 30 méter, vagy nincs elhatározási magasság és a futópálya mellett mért látástávolság 200 méter vagy annál több) minimum esetén és biztonságban a földre vinni.

A másik irány pedig olyan szinten automatizálni a repülőgép rendszereit, hogy azok egymással együttműködve és egymást ellenőrizve, minden emberi beavatkozás nélkül földre vigyék a repülőgépet. Ebben az esetben a pilóták feladataikat kettéosztják. A repülőgépen repülő két pilóta közül egyik a repülőgépet vezeti. Kifelé néz és keresi az időjárás minimumához megfelelő vizuális tájékozódási jeleket, az esetek nagy többségében a kifutópálya vagy a bevezető fénysor fényei. A Pilot assisting vagy más néven Pilot non Flying a rendszerek megfelelő működését ellenőrzi – csak és kizárólag befele néz – és tájékoztatja a repülőgépet vezető pilótát a meghibásodásokról.

Amennyiben a pilóták a fenti módszer alkalmazzák, a repülőgép legfontosabb rendszere a Flight Director, FD. Ennek a rendszernek a segítségével a pilóták – illetve automatikus megközelítés esetén a robotpilóta – „elvezeti” a repülőgépet. Az FD minden repülési üzemmódban használható és rossz időben történő megközelítés esetén erősen ajánlott a használata.